Training a Brain Dynamics Model#
![]()

In recent years, we saw the revolution that training a dynamical system from data or tasks has provided important insights to understand brain functions. To support this, BrainPy provides various interfaces to help users train dynamical systems.
import brainpy as bp
import brainpy.math as bm
import brainpy_datasets as bd
import matplotlib.pyplot as plt
bm.enable_x64()
bm.set_platform('cpu')
bp.__version__
'2.4.3'
Training a reservoir network model#
For an echo state network, we have three components: an input node (“I”), a reservoir node (“R”) for dimension expansion, and an output node (“O”) for linear readout.
(Gauthier, et. al., Nature Communications, 2021) has proposed a next generation reservoir computing (NG-RC) model by using nonlinear vector autoregression (NVAR).
The difference between the two models is illustrated in the following figure.
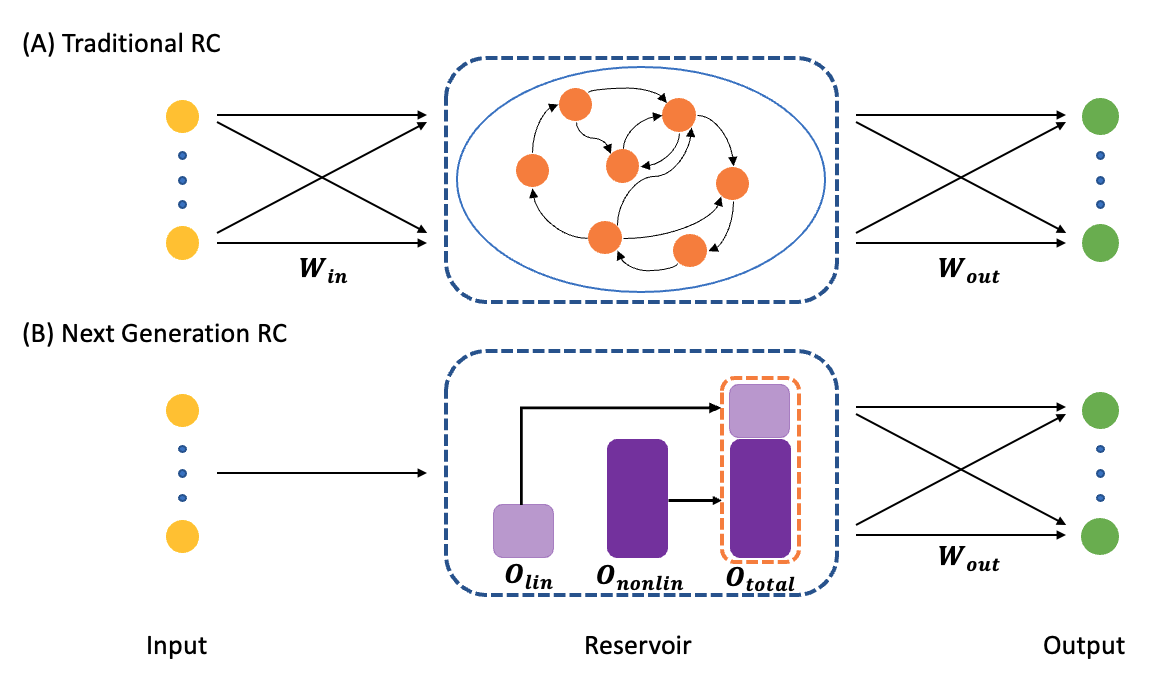
(A) A traditional RC processes time-series data using an artificial recurrent neural network. (B) The NG-RC performs a forecast using a linear weight of time-delay states of the time series data and nonlinear functionals of this data.
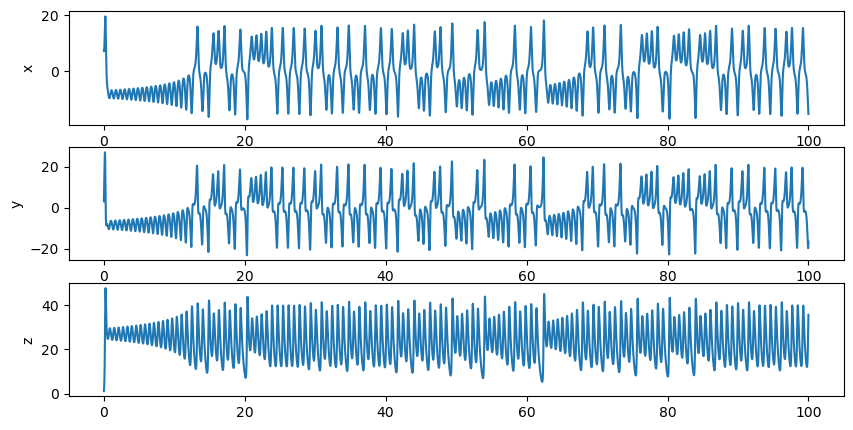
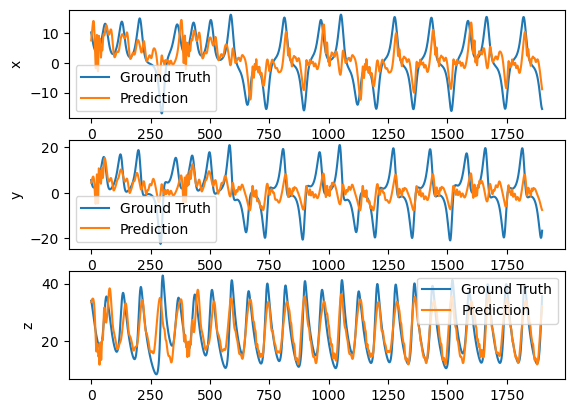
Here, let’s implement a next generation reservoir model to predict the chaotic time series, named as Lorenz attractor. Particularly, we expect the network has the ability to predict \(P(t+l)\) from \(P(t)\), where \(l\) is the length of the prediction ahead.
dt = 0.01
data = bd.chaos.LorenzEq(100, dt=dt)
plt.figure(figsize=(10, 5))
plt.subplot(311)
plt.plot(bm.as_numpy(data.ts), bm.as_numpy(data.xs.flatten()))
plt.ylabel('x')
plt.subplot(312)
plt.plot(bm.as_numpy(data.ts), bm.as_numpy(data.ys.flatten()))
plt.ylabel('y')
plt.subplot(313)
plt.plot(bm.as_numpy(data.ts), bm.as_numpy(data.zs.flatten()))
plt.ylabel('z')
plt.show()
Let’s first create a function to get the data.
def get_subset(data, start, end):
res = {'x': data.xs[start: end],
'y': data.ys[start: end],
'z': data.zs[start: end]}
res = bm.hstack([res['x'], res['y'], res['z']])
return res.reshape((1, ) + res.shape)
To accomplish this task, we implement a next-generation reservoir model of 4 delay history information with stride of 5, and their quadratic polynomial monomials, same as (Gauthier, et. al., Nature Communications, 2021).
class NGRC(bp.DynamicalSystem):
def __init__(self, num_in, num_out):
super(NGRC, self).__init__()
self.r = bp.dnn.NVAR(num_in, delay=4, order=2, stride=5)
self.o = bp.dnn.Dense(self.r.num_out, num_out, mode=bm.training_mode)
def update(self, x):
return self.o(self.r(x))
with bm.environment(bm.batching_mode): # Batching Computing Mode
model = NGRC(num_in=3, num_out=3)
Moreover, we use Ridge Regression method to train the model.
trainer = bp.RidgeTrainer(model, alpha=1e-6)
We warm-up the network with 20 ms.
warmup_data = get_subset(data, 0, int(20/dt))
outs = trainer.predict(warmup_data)
# outputs should be an array with the shape of
# (num_batch, num_time, num_out)
outs.shape
(1, 2000, 3)
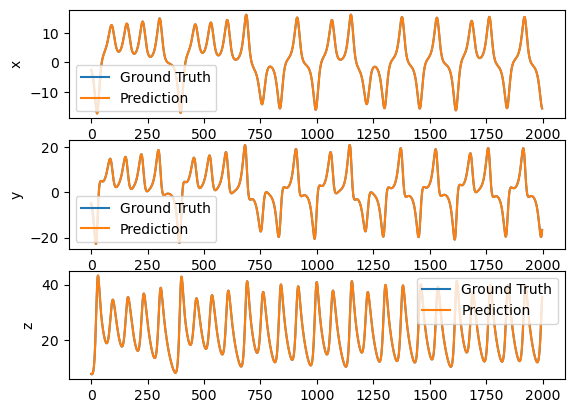
The training data is the time series from 20 ms to 80 ms. We want the network has the ability to forecast 1 time step ahead.
x_train = get_subset(data, int(20/dt), int(80/dt))
y_train = get_subset(data, int(20/dt)+1, int(80/dt)+1)
_ = trainer.fit([x_train, y_train])
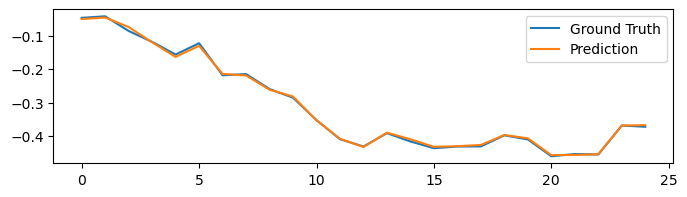
Then we test the trained network with the next 20 ms.
x_test = get_subset(data, int(80/dt), int(100/dt)-1)
y_test = get_subset(data, int(80/dt) + 1, int(100/dt))
predictions = trainer.predict(x_test)
bp.losses.mean_squared_error(y_test, predictions)
Array(5.36414848e-10, dtype=float64)
def plot_difference(truths, predictions):
truths = bm.as_numpy(truths)
predictions = bm.as_numpy(predictions)
plt.subplot(311)
plt.plot(truths[0, :, 0], label='Ground Truth')
plt.plot(predictions[0, :, 0], label='Prediction')
plt.ylabel('x')
plt.legend()
plt.subplot(312)
plt.plot(truths[0, :, 1], label='Ground Truth')
plt.plot(predictions[0, :, 1], label='Prediction')
plt.ylabel('y')
plt.legend()
plt.subplot(313)
plt.plot(truths[0, :, 2], label='Ground Truth')
plt.plot(predictions[0, :, 2], label='Prediction')
plt.ylabel('z')
plt.legend()
plt.show()
plot_difference(y_test, predictions)
We can make the task harder to forecast 10 time step ahead.
warmup_data = get_subset(data, 0, int(20/dt))
outs = trainer.predict(warmup_data)
x_train = get_subset(data, int(20/dt), int(80/dt))
y_train = get_subset(data, int(20/dt)+10, int(80/dt)+10)
trainer.fit([x_train, y_train])
x_test = get_subset(data, int(80/dt), int(100/dt)-10)
y_test = get_subset(data, int(80/dt) + 10, int(100/dt))
predictions = trainer.predict(x_test)
plot_difference(y_test, predictions)
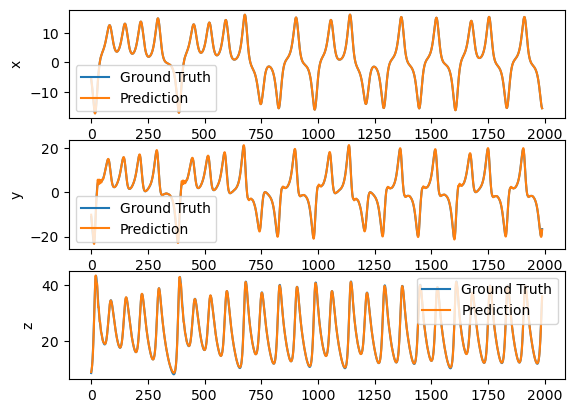
Or forecast 100 time step ahead.
warmup_data = get_subset(data, 0, int(20/dt))
_ = trainer.predict(warmup_data)
x_train = get_subset(data, int(20/dt), int(80/dt))
y_train = get_subset(data, int(20/dt)+100, int(80/dt)+100)
trainer.fit([x_train, y_train])
x_test = get_subset(data, int(80/dt), int(100/dt)-100)
y_test = get_subset(data, int(80/dt) + 100, int(100/dt))
predictions = trainer.predict(x_test)
plot_difference(y_test, predictions)
As you see, forecasting larger time step makes the learning more difficult.
Training an artificial recurrent network#
In recent years, artificial recurrent neural networks trained with back propagation through time (BPTT) have been a useful tool to study the network mechanism of brain functions. To support training networks with BPTT, BrainPy provides brainpy.train.BPTT interface.
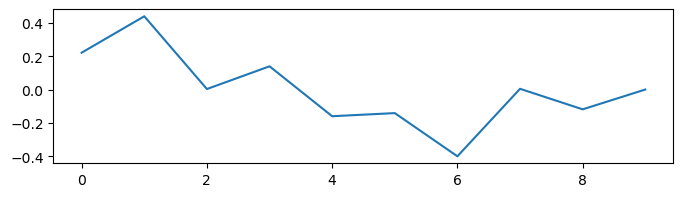
Here, we demonstrate how to train an artificial recurrent neural network by using a white noise integration task. In this task, we want our trained RNN model has the ability to integrate white noise. For example, if we have a time series of noise data,
noises = bm.random.normal(0, 0.2, size=10)
plt.figure(figsize=(8, 2))
plt.plot(noises.to_numpy().flatten())
plt.show()
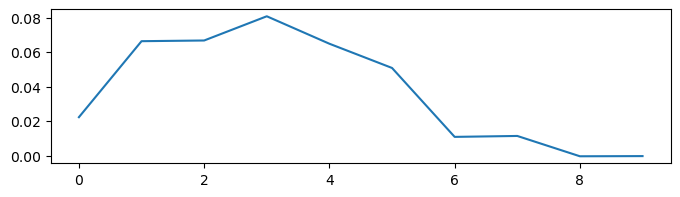
Now, we want to get a model which can integrate the noise bm.cumsum(noises) * dt:
dt = 0.1
integrals = bm.cumsum(noises) * dt
plt.figure(figsize=(8, 2))
plt.plot(integrals.to_numpy().flatten())
plt.show()
Here, we first define a task which generates the input data and the target integration results.
from functools import partial
dt = 0.04
num_step = int(1.0 / dt)
num_batch = 128
@bm.jit
def build_inputs_and_targets(mean=0.025, scale=0.01):
# Create the white noise input
sample = bm.random.normal(size=(num_batch, 1, 1))
bias = mean * 2.0 * (sample - 0.5)
samples = bm.random.normal(size=(num_batch, num_step, 1))
noise_t = scale / dt ** 0.5 * samples
inputs = bias + noise_t
targets = bm.cumsum(inputs, axis=1)
return inputs, targets
def train_data():
for _ in range(100):
yield build_inputs_and_targets()
Then, we create and initialize the model. Note here we need the model train its initial state, so we need set state_trainable=True for the used VanillaRNN instance.
class RNN(bp.DynamicalSystem):
def __init__(self, num_in, num_hidden):
super(RNN, self).__init__()
self.rnn = bp.dnn.RNNCell(num_in, num_hidden, train_state=True)
self.out = bp.dnn.Dense(num_hidden, 1)
def update(self, x):
return self.out(self.rnn(x))
with bm.training_environment():
model = RNN(1, 100)
brainpy.nn.BPTT trainer receives a loss function setting, and an optimizer setting. Loss function can be selected from the brainpy.losses module, or it can be a callable function receives (predictions, targets) argument. Optimizer setting must be an instance of brainpy.optim.Optimizer.
Here we define a loss function which use Mean Squared Error (MSE) to measure the error between the targets and the predictions. We also apply a L2 regularization.
# define loss function
def loss(predictions, targets, l2_reg=2e-4):
mse = bp.losses.mean_squared_error(predictions, targets)
l2 = l2_reg * bp.losses.l2_norm(model.train_vars().unique().dict()) ** 2
return mse + l2
# define optimizer
lr = bp.optim.ExponentialDecay(lr=0.025, decay_steps=1, decay_rate=0.99975)
opt = bp.optim.Adam(lr=lr, eps=1e-1)
# create a trainer
trainer = bp.BPTT(model, loss_fun=loss, optimizer=opt)
# train the model
trainer.fit(train_data, num_epoch=30)
Train 0 epoch, use 2.4464 s, loss 0.5766880554736651
Train 1 epoch, use 1.1099 s, loss 0.18737644507284465
Train 2 epoch, use 1.1105 s, loss 0.029512605853765174
Train 3 epoch, use 1.0999 s, loss 0.022153461316010897
Train 4 epoch, use 1.1596 s, loss 0.021470779710696993
Train 5 epoch, use 1.0970 s, loss 0.021237800168232967
Train 6 epoch, use 1.0933 s, loss 0.021077761293748783
Train 7 epoch, use 1.1013 s, loss 0.020988268389933076
Train 8 epoch, use 1.1351 s, loss 0.020881592860784327
Train 9 epoch, use 1.0902 s, loss 0.020800122704859064
Train 10 epoch, use 1.0945 s, loss 0.020776280380879975
Train 11 epoch, use 1.0857 s, loss 0.020679230765592096
Train 12 epoch, use 1.0770 s, loss 0.020639761240264422
Train 13 epoch, use 1.1391 s, loss 0.020581231132164382
Train 14 epoch, use 1.0825 s, loss 0.020513952644717365
Train 15 epoch, use 1.0602 s, loss 0.02047708742212138
Train 16 epoch, use 1.0799 s, loss 0.020433440864520126
Train 17 epoch, use 1.1100 s, loss 0.020380227814558855
Train 18 epoch, use 1.1137 s, loss 0.02032947231247135
Train 19 epoch, use 1.0692 s, loss 0.020293246005128048
Train 20 epoch, use 1.0781 s, loss 0.0202505361002092
Train 21 epoch, use 1.0709 s, loss 0.020229718123718498
Train 22 epoch, use 1.1434 s, loss 0.020182921461356827
Train 23 epoch, use 1.0728 s, loss 0.020146935495579617
Train 24 epoch, use 1.0601 s, loss 0.020117813679290775
Train 25 epoch, use 1.0734 s, loss 0.02005892271073493
Train 26 epoch, use 1.0664 s, loss 0.020039180853512945
Train 27 epoch, use 1.1423 s, loss 0.02000734470957238
Train 28 epoch, use 1.0681 s, loss 0.019964011043923396
Train 29 epoch, use 1.0633 s, loss 0.019928165854451382
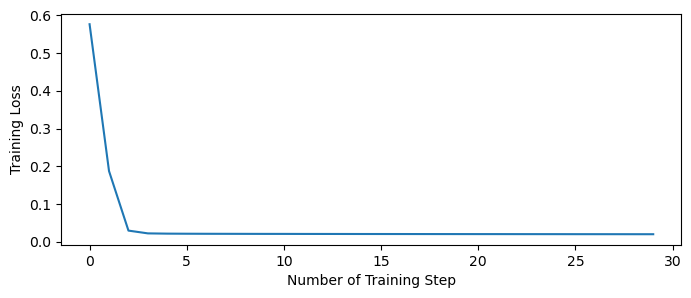
The training losses can be retrieved by .get_hist_metric() function.
plt.figure(figsize=(8, 3))
plt.plot(trainer.get_hist_metric(metric='loss'))
plt.xlabel('Number of Training Step')
plt.ylabel('Training Loss')
plt.show()
Finally, let’s try the trained network, and test whether it can generate the correct integration results.
model.reset(num_batch)
x, y = build_inputs_and_targets()
predicts = trainer.predict(x)
plt.figure(figsize=(8, 2))
plt.plot(bm.as_numpy(y[0]).flatten(), label='Ground Truth')
plt.plot(bm.as_numpy(predicts[0]).flatten(), label='Prediction')
plt.legend()
plt.show()
Training a spiking neural network#
BrainPy also supports to train spiking neural networks.
In the following, we demonstrate how to use back-propagation algorithms to train spiking neurons with a simple example.
Our model is a simple three layer model:
an input layer
a LIF layer
a readout layer
The synaptic connection between each layer is the Exponenetial synapse model.
bm.set_dt(1.)
class SNN(bp.DynamicalSystem):
def __init__(self, num_in, num_rec, num_out):
super().__init__()
# parameters
self.num_in = num_in
self.num_rec = num_rec
self.num_out = num_out
# neuron groups
self.r = bp.dyn.Lif(num_rec, tau=10., V_reset=0., V_rest=0., V_th=1.)
self.o = bp.dyn.Integrator(num_out, tau=5.)
# synapse: i->r
self.i2r = bp.Sequential(
comm=bp.dnn.Linear(num_in, num_rec, W_initializer=bp.init.KaimingNormal(scale=20.)),
syn=bp.dyn.Expon(num_rec, tau=10.),
)
# synapse: r->o
self.r2o = bp.Sequential(
comm=bp.dnn.Linear(num_rec, num_out, W_initializer=bp.init.KaimingNormal(scale=20.)),
syn=bp.dyn.Expon(num_out, tau=10.),
)
def update(self, spike):
return spike >> self.i2r >> self.r >> self.r2o >> self.o
num_in = 100
num_rec = 10
with bm.training_environment():
net = SNN(num_in, num_rec, 2) # out task is a two label classification task
We try to use this simple task to classify a random spiking data into two classes.
num_step = 100
num_sample = 256
freq = 10 # Hz
mask = bm.random.rand(num_step, num_sample, num_in)
x_data = bm.zeros((num_step, num_sample, num_in))
x_data[mask < freq * bm.get_dt() / 1000.] = 1.0
y_data = bm.asarray(bm.random.rand(num_sample) < 0.5, dtype=bm.float_)
indices = bm.arange(num_step)
Same as the training of artificial recurrent neural networks, we use Adam optimizer and cross entropy loss to train the model.
class Trainer:
def __init__(self, net, opt):
self.net = net
self.opt = opt
opt.register_train_vars(net.train_vars().unique())
self.f_grad = bm.grad(self.f_loss, grad_vars=self.opt.vars_to_train, return_value=True)
def f_loss(self):
self.net.reset(num_sample)
outs = bm.for_loop(self.net.step_run, (indices, x_data))
return bp.losses.cross_entropy_loss(bm.max(outs, axis=0), y_data)
@bm.cls_jit
def f_train(self):
grads, loss = self.f_grad()
self.opt.update(grads)
return loss
trainer = Trainer(net=net, opt=bp.optim.Adam(lr=4e-3))
for i in range(1000):
l = trainer.f_train()
if (i + 1) % 100 == 0:
print(f'Train {i + 1} steps, loss {l}')
Train 100 steps, loss 0.48558747465289087
Train 200 steps, loss 0.34453656817716244
Train 300 steps, loss 0.2606520733783064
Train 400 steps, loss 0.20660065308143077
Train 500 steps, loss 0.1675908761327508
Train 600 steps, loss 0.142560914160225
Train 700 steps, loss 0.1268986054462629
Train 800 steps, loss 0.10401217239952576
Train 900 steps, loss 0.09560546325224988
Train 1000 steps, loss 0.08587920871325855
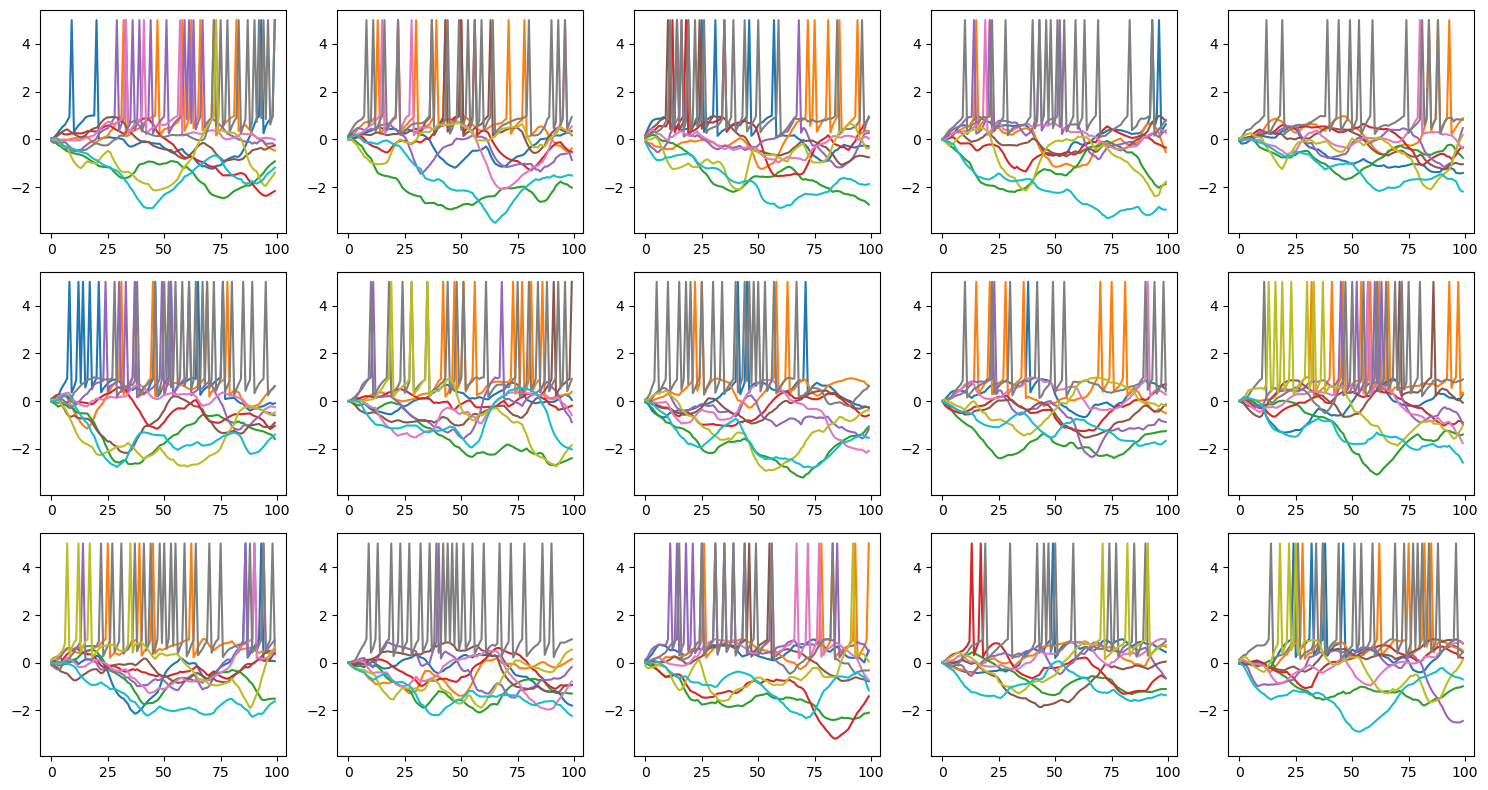
Let’s visualize the trained spiking neurons.
import numpy as np
from matplotlib.gridspec import GridSpec
def plot_voltage_traces(mem, spk=None, dim=(3, 5), spike_height=5):
plt.figure(figsize=(15, 8))
gs = GridSpec(*dim)
mem = 1. * mem
if spk is not None:
mem[spk > 0.0] = spike_height
mem = bm.as_numpy(mem)
for i in range(np.prod(dim)):
if i == 0:
a0 = ax = plt.subplot(gs[i])
else:
ax = plt.subplot(gs[i], sharey=a0)
ax.plot(mem[:, i])
plt.tight_layout()
plt.show()
runner = bp.DSRunner(
net, data_first_axis='T',
monitors={'r.spike': net.r.spike, 'r.membrane': net.r.V},
)
out = runner.run(inputs=x_data, reset_state=True)
plot_voltage_traces(runner.mon.get('r.membrane'), runner.mon.get('r.spike'))
# the prediction accuracy
m = bm.max(out, axis=0) # max over time
am = bm.argmax(m, axis=1) # argmax over output units
acc = bm.mean(y_data == am) # compare to labels
print("Accuracy %.3f" % acc)
Accuracy 0.973