High-dimensional Analyzers#
![]()

It’s hard to analyze high-dimensional systems. However, we have to analyze high-dimensional systems.
Here, based on numerical optimization methods, BrainPy provides brainpy.analysis.SlowPointFinder to help users find slow points (or fixed points) [1] for your high-dimensional dynamical systems.
import brainpy as bp
import brainpy.math as bm
bm.set_platform('cpu')
bp.__version__
'2.4.0'
What are slow points?#
For the given system,
we wish to find values \(x^∗\) around which the system is approximately linear. Using Taylor series expansion, we have
We want the first derivative term (i.e., the linear term) to be dominant, which means \(f(x^*) = 0\) or \(f(x^*) \approx 0\).
For \(f(x^*) \approx 0\) which is nonzero but small, we call the point \(x^*\) a slow point.
More specially, if \(f(x^*) = 0\), \(x^*\) is a fixed point.
How to find slow points?#
In order to find slow points, we can first define an auxiliary scalar function for your continous system \(\dot{x} = f(x)\),
Or, if your system is discrete \(x_n = f(x_{n-1})\), the auxiliary scalar function can be defined as
If \(x^*\) is a slow point, \(p(x^*) \to 0\).
Then, by minimizing the scalar function \(p(x)\), we can get the candidate points for slow points and for further linearization. For the linear system, it’s stability is evaluated by the eigenvalues of Jacobian matrix.
Here, BrainPy provides brainpy.analysis.SlowPointFinder. It receives f_cell to specify the target function/object to analyze.
If the provided f_cell is a function, SlowPointFinder can supports to specify:
f_type: the type of the function (it can be “continuous” or “discrete”).f_loss: the loss function to minimize the optimization error.args: extra arguments passed into the function when performing fixed point optimization.
If the provided f_cell is an instance of DynamicalSystem, SlowPointFinder can supports to specify:
f_loss: the loss function to minimize the optimization error.args: extra arguments passed into the definedupdate()function when performing fixed point optimization.inputsandfun_inputs: inputs to this dynamical system. Similar to the inputs ofDSRunnerandDSTrainer.target_vars: the selected variables which are used to optimize fixed points. Other variables like “input” and “spike” can be ignored.
Then, brainpy.analysis.SlowPointFinder can help you:
optimize to find the fixed/slow points with gradient descent algorithms (
find_fps_with_gd_method()) or nonlinear optimization solver (find_fps_with_opt_solver())exclude any fixed points whose losses are above threshold:
filter_loss()exclude any non-unique fixed points according to a tolerance:
keep_unique()exclude any far-away “outlier” fixed points:
exclude_outliers()computing the jacobian matrix for the given fixed/slow points:
compute_jacobians()
Example 1: Decision Making Model#
brainpy.analysis.SlowPointFinder is aimed to find slow/fixed points of high-dimensional systems. Of course, it can optimize to find fixed points of low-dimensional systems. We take the 2D decision-making system as an example.
# parameters
gamma = 0.641 # Saturation factor for gating variable
tau = 0.06 # Synaptic time constant [sec]
a = 270.
b = 108.
d = 0.154
JE = 0.3725 # self-coupling strength [nA]
JI = -0.1137 # cross-coupling strength [nA]
JAext = 0.00117 # Stimulus input strength [nA]
mu = 20. # Stimulus firing rate [spikes/sec]
coh = 0.5 # Stimulus coherence [%]
Ib1 = 0.3297
Ib2 = 0.3297
@bp.odeint
def int_s1(s1, t, s2, coh=0.5, mu=20.):
I1 = JE * s1 + JI * s2 + Ib1 + JAext * mu * (1. + coh)
r1 = (a * I1 - b) / (1. - bm.exp(-d * (a * I1 - b)))
return - s1 / tau + (1. - s1) * gamma * r1
@bp.odeint
def int_s2(s2, t, s1, coh=0.5, mu=20.):
I2 = JE * s2 + JI * s1 + Ib2 + JAext * mu * (1. - coh)
r2 = (a * I2 - b) / (1. - bm.exp(-d * (a * I2 - b)))
return - s2 / tau + (1. - s2) * gamma * r2
def step(s):
ds1 = int_s1.f(s[0], 0., s[1])
ds2 = int_s2.f(s[1], 0., s[0])
return bm.asarray([ds1, ds2])
We first use brainpy.analysis.PhasePlane2D to get the standard answer.
analyzer = bp.analysis.PhasePlane2D(
model=[int_s1, int_s2],
target_vars={'s1': [0, 1], 's2': [0, 1]},
resolutions=0.001,
)
analyzer.plot_fixed_point(select_candidates='aux_rank', with_plot=False)
I am searching fixed points ...
I am filtering out fixed point candidates with auxiliary function ...
I am trying to find fixed points by optimization ...
There are 100 candidates
I am trying to filter out duplicate fixed points ...
Found 3 fixed points.
#1 s1=0.2827633321285248, s2=0.40635180473327637 is a saddle node.
#2 s1=0.013946513645350933, s2=0.6573889851570129 is a stable node.
#3 s1=0.7004518508911133, s2=0.004864312242716551 is a stable node.
Then, let’s check whether the high-dimensional analyzer also works.
finder = bp.analysis.SlowPointFinder(f_cell=step, f_type="continuous")
finder.find_fps_with_gd_method(
candidates=bm.random.random((1000, 2)),
tolerance=1e-5,
num_batch=200,
optimizer=bp.optimizers.Adam(bp.optimizers.ExponentialDecay(0.01, 1, 0.9999))
)
finder.filter_loss(1e-5)
finder.keep_unique()
Optimizing with Adam(lr=ExponentialDecay(0.01, decay_steps=1, decay_rate=0.9999), last_call=-1), beta1=0.9, beta2=0.999, eps=1e-08) to find fixed points:
Batches 1-200 in 0.33 sec, Training loss 0.0564389601
Batches 201-400 in 0.26 sec, Training loss 0.0043550408
Batches 401-600 in 0.27 sec, Training loss 0.0005843132
Batches 601-800 in 0.24 sec, Training loss 0.0001128447
Batches 801-1000 in 0.25 sec, Training loss 0.0000241747
Batches 1001-1200 in 0.25 sec, Training loss 0.0000052570
Stop optimization as mean training loss 0.0000052570 is below tolerance 0.0000100000.
Excluding fixed points with squared speed above tolerance 1e-05:
Kept 954/1000 fixed points with tolerance under 1e-05.
Excluding non-unique fixed points:
Kept 3/954 unique fixed points with uniqueness tolerance 0.025.
finder.fixed_points
array([[0.01394652, 0.657389 ],
[0.28276348, 0.4063521 ],
[0.700452 , 0.00486421]], dtype=float32)
Yeah, the fixed points found by brainpy.analysis.PhasePlane2D and brainpy.analysis.SlowPointFinder are nearly the same.
Example 2: Continuous-attractor Neural Network#
Continuous-attractor neural network [2] proposed by Si Wu is a special model which has a line of attractors.
class CANN1D(bp.NeuGroup):
def __init__(self, num, tau=1., k=8.1, a=0.5, A=10., J0=4., z_min=-bm.pi, z_max=bm.pi):
super(CANN1D, self).__init__(size=num)
# parameters
self.tau = tau # The synaptic time constant
self.k = k # Degree of the rescaled inhibition
self.a = a # Half-width of the range of excitatory connections
self.A = A # Magnitude of the external input
self.J0 = J0 # maximum connection value
# feature space
self.z_min = z_min
self.z_max = z_max
self.z_range = z_max - z_min
self.x = bm.linspace(z_min, z_max, num) # The encoded feature values
self.rho = num / self.z_range # The neural density
self.dx = self.z_range / num # The stimulus density
# variables
self.u = bm.Variable(bm.zeros(num))
self.input = bm.Variable(bm.zeros(num))
# The connection matrix
self.conn_mat = self.make_conn(self.x)
# function
self.integral = bp.odeint(self.derivative)
def derivative(self, u, t, Iext):
r1 = bm.square(u)
r2 = 1.0 + self.k * bm.sum(r1)
r = r1 / r2
Irec = bm.dot(self.conn_mat, r)
du = (-u + Irec + Iext) / self.tau
return du
def dist(self, d):
d = bm.remainder(d, self.z_range)
d = bm.where(d > 0.5 * self.z_range, d - self.z_range, d)
return d
def make_conn(self, x):
assert bm.ndim(x) == 1
x_left = bm.reshape(x, (-1, 1))
x_right = bm.repeat(x.reshape((1, -1)), len(x), axis=0)
d = self.dist(x_left - x_right)
Jxx = self.J0 * bm.exp(-0.5 * bm.square(d / self.a)) / (bm.sqrt(2 * bm.pi) * self.a)
return Jxx
def get_stimulus_by_pos(self, pos):
return self.A * bm.exp(-0.25 * bm.square(self.dist(self.x - pos) / self.a))
def update(self, tdi):
self.u.value = self.integral(self.u, tdi.t, self.input, tdi.dt)
self.input[:] = 0.
def cell(self, u):
return self.derivative(u, 0., 0.)
cann = CANN1D(num=512, k=0.1, A=30)
The following code demonstrates how to use SlowPointFinder to find fixed points of a continuous attractor neural network.
# initialize an instance of slow point finder
finder = bp.analysis.SlowPointFinder(
f_cell=cann,
target_vars={'u': cann.u},
dt=1.,
)
# we can initialize our candidate points with noisy bumps.
candidates = cann.get_stimulus_by_pos(bm.arange(-bm.pi, bm.pi, 0.01).reshape((-1, 1)))
candidates += bm.random.normal(0., 0.01, candidates.shape)
# optimize to find fixed points
finder.find_fps_with_opt_solver({'u': candidates})
finder.filter_loss(1e-6)
finder.keep_unique()
Optimizing with BFGS to find fixed points:
Found 629 fixed points from 629 initial points.
Excluding fixed points with squared speed above tolerance 1e-06:
Kept 357/629 fixed points with tolerance under 1e-06.
Excluding non-unique fixed points:
Kept 357/357 unique fixed points with uniqueness tolerance 0.025.
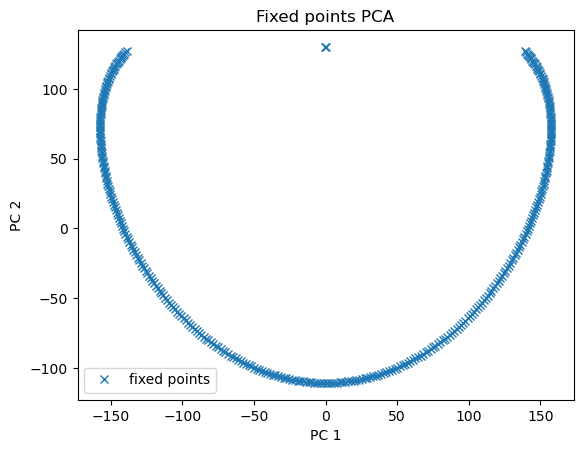
The found fixed points are a series of attractor. We can visualize this line of attractors on a 2D space.
from sklearn.decomposition import PCA
import matplotlib.pyplot as plt
pca = PCA(2)
fp_pcs = pca.fit_transform(finder.fixed_points['u'])
plt.plot(fp_pcs[:, 0], fp_pcs[:, 1], 'x', label='fixed points')
plt.xlabel('PC 1')
plt.ylabel('PC 2')
plt.title('Fixed points PCA')
plt.legend()
plt.show()
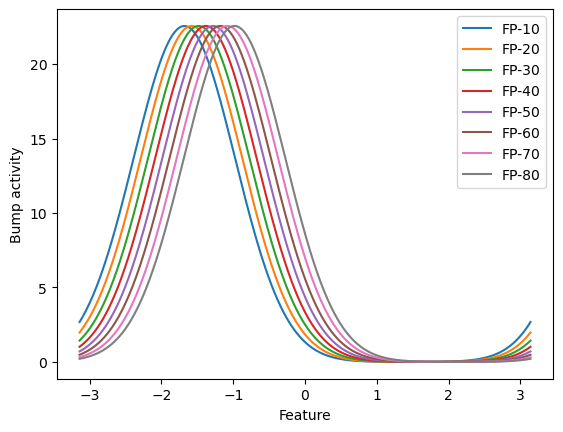
These fixed points can also be plotted on the feature space. In the following, we plot the selected points.
def visualize_fixed_points(fps, plot_ids=(0,), xs=None):
for i in plot_ids:
if xs is None:
plt.plot(fps[i], label=f'FP-{i}')
else:
plt.plot(xs, fps[i], label=f'FP-{i}')
plt.legend()
plt.xlabel('Feature')
plt.ylabel('Bump activity')
plt.show()
visualize_fixed_points(finder.fixed_points['u'],
plot_ids=(10, 20, 30, 40, 50, 60, 70, 80),
xs=cann.x)
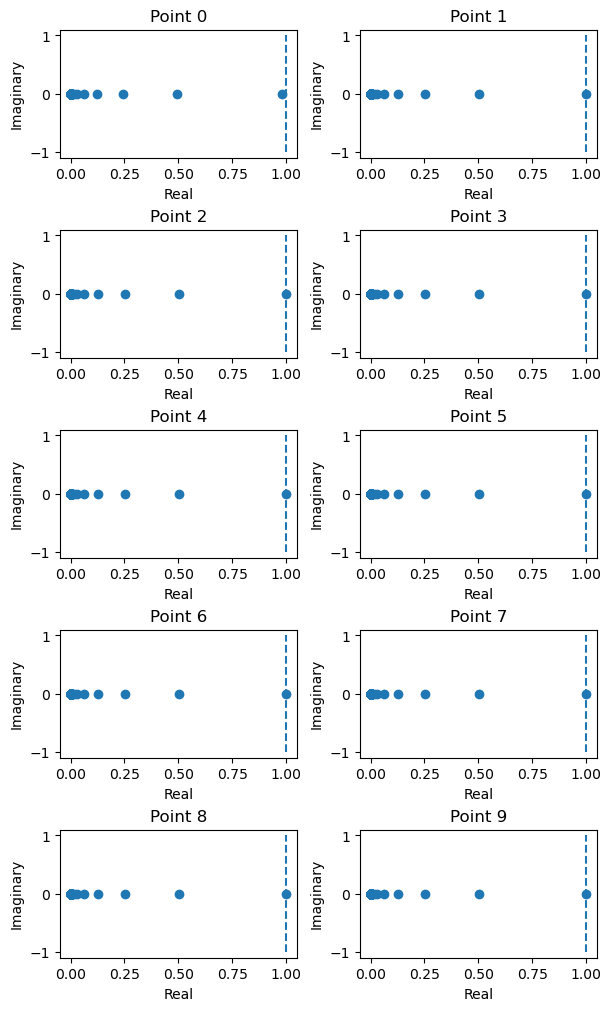
Let’s find the linear part or the Jacobian matrix around the fixed points. We decompose Jacobian matrix and then visualize its stability.
from jax import tree_map
# select the first ten fixed points
fps = tree_map(lambda a: a[:10], finder._fixed_points)
# compute jacobian and visualize the decomposed jacobian matrix
J = finder.compute_jacobians(fps, plot=True, num_col=2)
More examples of dynamics analysis, for example, analyzing the fixed points in a recurrent neural network, please see BrainPy Examples.
References#
[1] Sussillo, D. , and O. Barak . “Opening the Black Box: Low-Dimensional Dynamics in High-Dimensional Recurrent Neural Networks.” Neural computation 25.3(2013):626-649.
[2] Si Wu, Kosuke Hamaguchi, and Shun-ichi Amari. “Dynamics and computation of continuous attractors.” Neural computation 20.4 (2008): 994-1025.